

Search for Articles
Secondary Publication Engineering in General Information Sciences
An e-Management Method and Self-Driving Frame of on-Demand-to-Supply Robot Type using Ternary/Pair-Map
Journal Of Digital Life.2023, 3,13;
Received:August 15, 2023 Accepted:September 27, 2023 Published:October 27, 2023

- Masayuki Matsui
- Research Institute for Engineering, Kanagawa University, Emeritus Professor at The University of Electro-Communications
Correspondence: matsui@kanagawa-u.ac.jp
Abstract
Our study on 3M&I-artifacts body looks at the (intangible) problems from the traditional Taylor-style static to dynamic (cock-pit) e-management approaches. Since the invention of pair-map (1983) at profit max, we are attempting to advance the on (moving-space)-management by pair (accelerator, brake) matrix approach. This attempt could be now characterized as the problem of profit max by pair (revenue, cost) method, and would be visualized and digitalized such as such a heliocentric vs. geocentric science as mobile “enterprise x computer” robots of SW (middle initiative) base. Finally, a static vs. moving-space automobile-like case on the pair-typed driving map is graphically given and discussed toward the shedding of classic pair-map at 2-center type since 1983.
1. Introduction
Our study on the science and technology of 3M&I-artifacts body in corporations (Matsui 2008, 2014) is beginning to bring the visualization of natural multi-artifacts body images to intangible artifacts and life (Matsui 2016, 2019a, 2022a). For example, there have been results that can boost the development of smart societies, economy, knowledge creation, digital world, and science and technology. In the development of economy engines and corporate robots, the schemes of GDP engine (Matsui 2022b), and convenience store robots (Matsui et al. 2019, Matsui et al. 2021) are being revealed, and a moving e-management method and its SW (middle initiative)-based design are expected for the future.
It started with the patent “Management display method and pair-map technology” (already released)(Matsui 2019b), the moving trajectory of its elliptical map seems to be connected to autonomous driving technology and moving management methods for artifacts bodies (including automobiles). This paper shows that the dual artifacts body (heliocentric vs. geocentric) of this “Copernicus view” has another starting point and it is a path to dynamic orbit management.
For example, in automobiles, perhaps the vehicle can be considered heliocentric, because it runs on a lower street, and the driver geocentric, because it is static while moving on an upper street. The sandwich between these lower and upper, in terms of workload (profit), is an artifacts body (intangible robot) with the role (function) of an integration (driving) that seeks to maximize the difference between acceleration (revenue) and brake (cost) in the profit formula.
Originally, in the ellipse theory of pair-maps, it is believed movement was buried into matrix elements (revenue and costs) in pairs (demand and production), and three-dimensional images were embedded in planes. A wave mechanism has been found on the axis of economy and reliability of the ellipse, and because of recent elliptical analysis based on flow rate data, a Carnot-like engine (Matsui 2023) can be seen in the economics.
Now, in artifacts body research, the digital technology for moving artifacts bodies from static to dynamic based on this pair-map method is drawing attention. The challenges in the automobile industry are still round-robin and total war-based, but the next-generation theoretical white-box approach proposed here has a paired (acceleration, brake) design and is set to become a step into the development of a two-center new frame (companies x computers).
2. “Copernicus view” artifacts body science and moving
e-management method
2.1 The types of “Copernicus view” artifacts bodies and the corporate robot problem
The traditional science of Copernicus view suggests that heliocentric and geocentric theories coexist in the universe, but science cases in which in both are handled simultaneously on an artifacts body may not be well known. Hence, this paper takes pairs that handle both simultaneously with these artifacts bodies as examples and starts by summarizing the knowledge involved in its science.
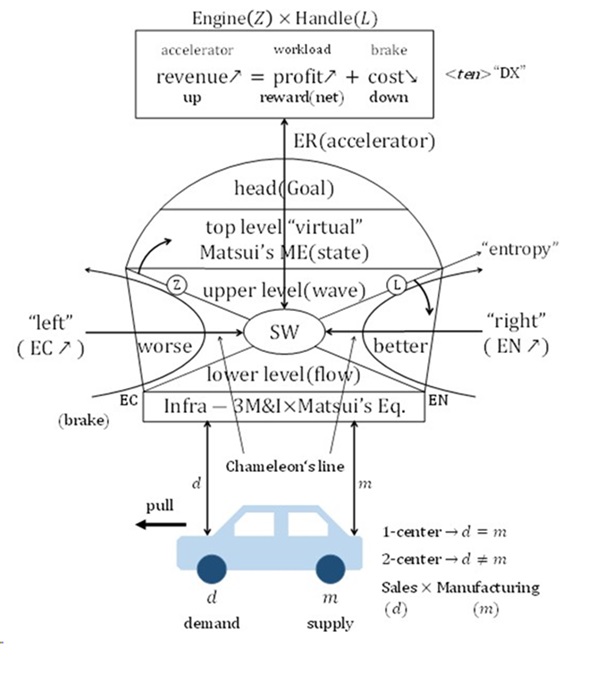
First, Figure 1 shows the classification according to our artifacts body science. In artifacts body science, we assume a sandwich layer corresponding to the human hip as a base, with upper and lower layers on top and under it, which are respectively assumed as universes of geocentric and heliocentric views. These can be tangible or intangible and the lower can be distinguished as moving static service of automobile type or static manufacturing of convenience store type.
Table 1. 3M&I artifacts: A pair lower (heliocentric) vs. upper (geocentric) view

In recent years, as part of artifacts body science development research, we have had progress in the development of corporate robots. So far, two papers on schemes of convenience store-type robots have been published. This time, however, the focus is the development of an autonomous driving scheme seeing automobiles as a kind of robot.
2.2 The core part of pair-hierarchy artifacts body and the autonomous driving scheme
In artifacts body science, a pair-hierarchy model that is familiar with pair matrixes has been presented. The sandwich layer at the center and the core above and under it can be seen in Figure 1. In the sandwich layer of Figure 1, the workload cooperates with the upper and lower layers, and it seeks a function that can maximize the profit (energy) as per the profit formula, and the acceleration (revenue) and brake (cost) are used in the control operations.
Therefore, our new autonomous driving scheme is about a static driver (operator) operating the engine (economy) vs. the steering wheel (reliability) while alternating between accelerator and brake, to operate the workload, based on the profit formula, while controlling the efficiency and safety. When the operation is on a specific pair-map, the autonomous driving is maintained within its range.
3. Autonomous driving frame and ellipse pair-map method
3.1 Pair matrix display: acceleration (revenue) vs. brake (costs) technology
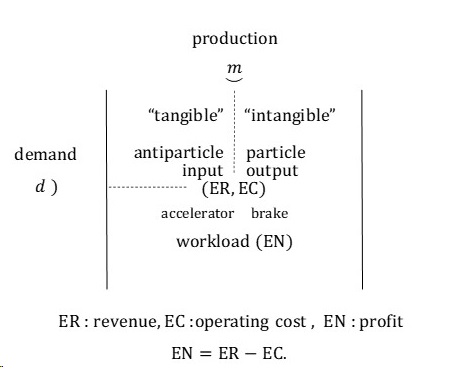
Regarding the pair matrix display of input (acceleration) and output (brake) in autonomous driving technology, it is possible to use the formula “Profit = Revenue – Costs”, with the profit as the acceleration and the cost as the brake, pair elements (acceleration, brake).
Figure 2 is a matrix display of operation (acceleration, brake) with pair elements of position (input d, output m). Based on this Figure 2, it is possible to draw the two-dimensional ellipse pair-map (economy Z , reliability L ) used in the autonomous driving frame and its trajectory on the map from the next section.
3.2 Engine (economy) vs. steering wheel (reliability) technology
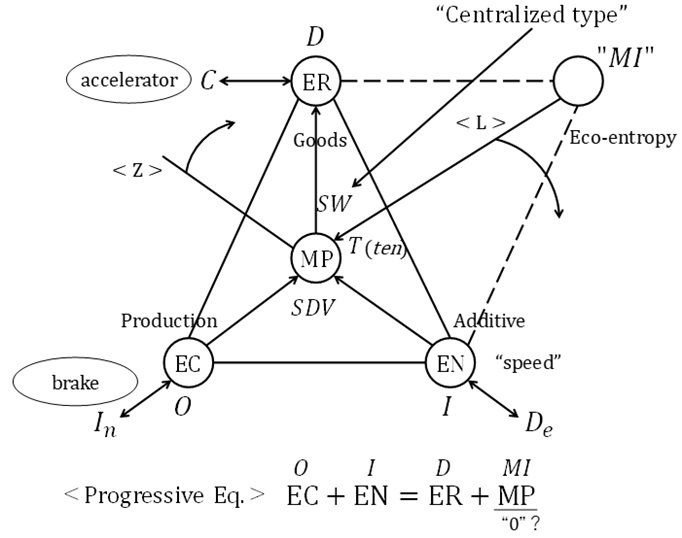
On the other hand, in the pair map elliptical intersection theory, the engine corresponds to economy, and the steering wheel to reliability, and by crossing each other on the pair-map, it is possible to make autonomous driving more efficient and safer.
Pair maps can already be expressed using Matsui’s matrix equation, so the advantage of its connection with the equation technology of autonomous driving is already known.
This pair-map method is initially expected to support management methods, but since the English management is also a controller, its connection with an autonomous driving method of cockpit style may be a natural process, in a way.
Figure 3 makes it possible to control a three-dimensional world on a two-dimensional map.
4. Frame utilization method of elliptical deformed pair-map
4.1 Static management type: examples of convenience store robots
The development of corporate robots started with convenience store robots using engine ODICS based on flow management methods. In recent years, a simple scheme of this convenience store robots was formulated by Matsui’s equation. The simple scheme has indicated that the conversion of the introduction, development, turn, and conclusion corresponds to DX (digital transformation).
The autonomous driving frame of convenience store robots uses the pair-maps of Figure 3 and 4. Figure 2 is a basic pair-map, and Figure 4 is its basic deformation and a variation. Here, as a static movement, it is assumed that the convenience store is static on the ground, a graphical approach is possible, and it is performing on-map driving.
Sample of space(static) management type
4.2 Moving e-management type: examples of automobile robots
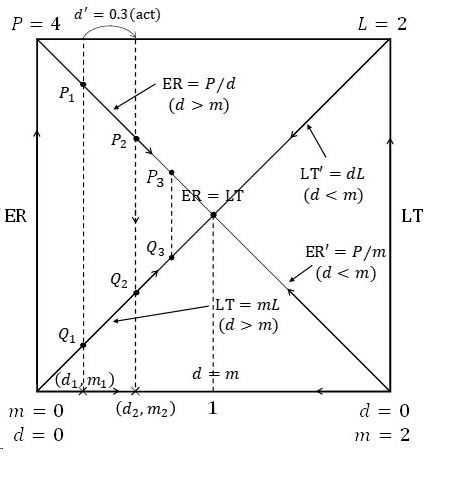
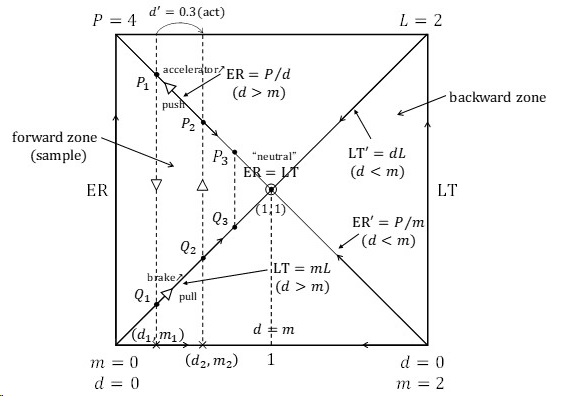
One of the most notable characteristics of corporate robots of automobile type is that it is static during movement; that is, it follows static management that moves on the road during its movement. During this process, when viewed from the world outside the vehicle, the management can be viewed as autonomous driving as moving management. For example, looking-ahead at the driving trajectory on Figure.5 that moves forward from the center with acceleration (speed d) as center 1,
the trapezoid P2 →P1→ Q1→ Q2 route represents two-step safe driving.
This is a cyclic trip in which the vehicle leaves (departures) the crossing point in the middle of the figure from a stillness (stopped), passes P1 and accelerates until P2, then heads to Q1 with a constant speed, lowers the speed at Q2 and returns to P1 .
In the behavior example of Figure 5 (d=m) , to simplify the trajectory, it is assumed that the road is a straight line. The difference in the movements of front tires (d) and rear tires (m) is not considered, and the trajectory when this difference varies at center 2
( d vs. m) is a topic for future research.
For example, if the trajectory is curvy, instead of straight, the variation of speeds d and m , as well as their distance differences change, which presumably makes the route on the map and trajectory more complicated.
5. Conclusion and next steps
As society become faster, smarter, and more fluid, our artifacts bodies are also required to respond from the traditional static management to moving orbit management. Our corporate robot study can also expand its scope from static convenience stores to moving e-management, “living” artifacts bodies (with data food, for example).
Initially, the sandwich-based pair-map elliptical intersection theory was expected to function as a graphic support for management methods. Recently, the map method was successfully expressed by Matsui’s matrix equation system, and corresponding development is expected. Also, the individual ternary SW map in this paper (see supplementary drawing) and its e-management/driving method and pair (acceleration, brake) technique is the shedding of the classical pair-map theory, and it is linked to same-phase 2-center new automatic/autonomous system and SDGs issues.
As English functions as both a language for management and a means of controlling a system, it may seamlessly intertwine with autonomous driving methods using cockpit-style interfaces. In algebraic terms, the utilization of the relationship of Matsui’s equation of type I (equation system) and type II (inherent equation) of introduction, development, turn and conclusion systems can be considered. Applying Matsui’s equation systems – types I and II, encompassing introduction, development, turn, and conclusion – may provide useful insights in this regard.
This paper is expected to function as a management method for new autonomous driving technology of moving orbit artifacts bodies, as well as variable design of nature versus artifacts bodies. Specially, it aims to develop next-generation artifacts bodies that are secure, safe, and more convenient for digital societies while also harmonizing with human needs.
Acknowledgements
This paper is a translation into English of the following research paper, which has already been published in Japanese.
Matsui, M. (2022). On-management method of pair map type: A pair-heliocentric geocentric science and its self-driving frame method of enterprise robot. The 13th Yokokan conference, Waseda University International Conference Center, C-3-1, Tokyo
References
Matsui, M. (2008). Manufacturing and Service Enterprise with Risks: A Stochastic Management Approach, International Series in OR&MS, 125, Springer. https://doi.org/10.1007/978-0-387-84804-4
Matsui, M. (2014). Manufacturing and Service Enterprise with Risks II: The Physics and Eco nomics of Management, International Series in OR&MS, 202, Springer. https://doi.org/10.1007/978-4-431-54619-1
Matsui, M. (2016). Fundamentals and Principles of Artifacts Science: 3M&I-Body System, Springer. https://doi.org/10.1007/978-981-10-0473-5
Matsui, M. (2019a). Theory, Formulation and Realization of Artifacts Science: 3M&I-Body System, Springer Briefs in Business, Springer. https://doi.org/10.1007/978-981-13-3495-5
Matsui, M. (2019b). Management Data Display Method, Generation Method, and Management Method, Japanese Unexamined Patent Application Publication 2/15/2002, 12/12/2019.
Matsui, M., Ishii, N. (2019). A Demand-to-Supply Enterprise Robot and its ODICS II Type for Convenience Store Application, Procedia Manufacturing (ICPR2019), 39, 381-388. https://doi.org/10.1016/j.promfg.2020.01.381
Matsui, M., Ohto-Fujita, E., Ishii, N. (2021). Humanized Robot of New Method & Time System and its Management: A Digital Transformation Case of Convenience Store Type, Proceedings of 26th International Conference on Production Research (ICPR2021), Springer. https://doi.org/10.1007/978-3-031-18641-7_10
Matsui, M. (2022a). Nature versus Artifacts Body: One-Leaf Hyperboloid Type, Pair-Map Microcosm and Nested Economics, Journal of Digital Life, 1. 1, 1-9. https://journal-digitallife.com/wp-content/themes/digitallife/assets/file/sample.pdf
Matsui, M. (2022b). Virtual GDP Engine: The Loop-Conveyor Problem in Sustainable Economics, and a Method for Formalizing Carnot-Like Dynamism and Win-Win & Sharing, Theoretical Economics Letters, 12, 761-767. https://doi.org/10.4236/tel.2022.123042
Matsui, M. (2023). AI-Digital Engine of Artificial Economic and Knowledge Type by Matsui’s Progressive Loop Approach, Theoretical Economics Letters, 12, 1288-1296. https://doi.org/10.4236/tel.2022.125069
Relevant Articles
-

Accuracy of peripheral oxygen saturation (SpO₂) at rest determined by a smart ring: A Study in Controlled Hypoxic Environments
by Yohei Takai - 2025,6
VIEW -
An attempt to realize digital transformation in local governments by utilizing the IT skills of information science students
by Edmund Soji Otabe - 2025,4
VIEW -
Fundamental Study on Detection of Dangerous Objects on the Road Surface Leading to Motorcycle Accidents Using a 360-Degree Camera
by Haruka Inoue - 2025,S1
VIEW -
Wildlife Approach Detection Using a Custom-Built Multimodal IoT Camera System with Environmental Sound Analysis
by Katsunori Oyama - 2025,S2
VIEW